如何精确测量一个物体的角速度?
参考资料
Moonshot回答
精确测量物体的角速度可以通过多种方法实现,包括:
-
使用陀螺仪:陀螺仪可以测量物体的角加速度,通过积分角加速度可以计算出角速度。这种方法在航空航天、汽车等领域有广泛应用。
-
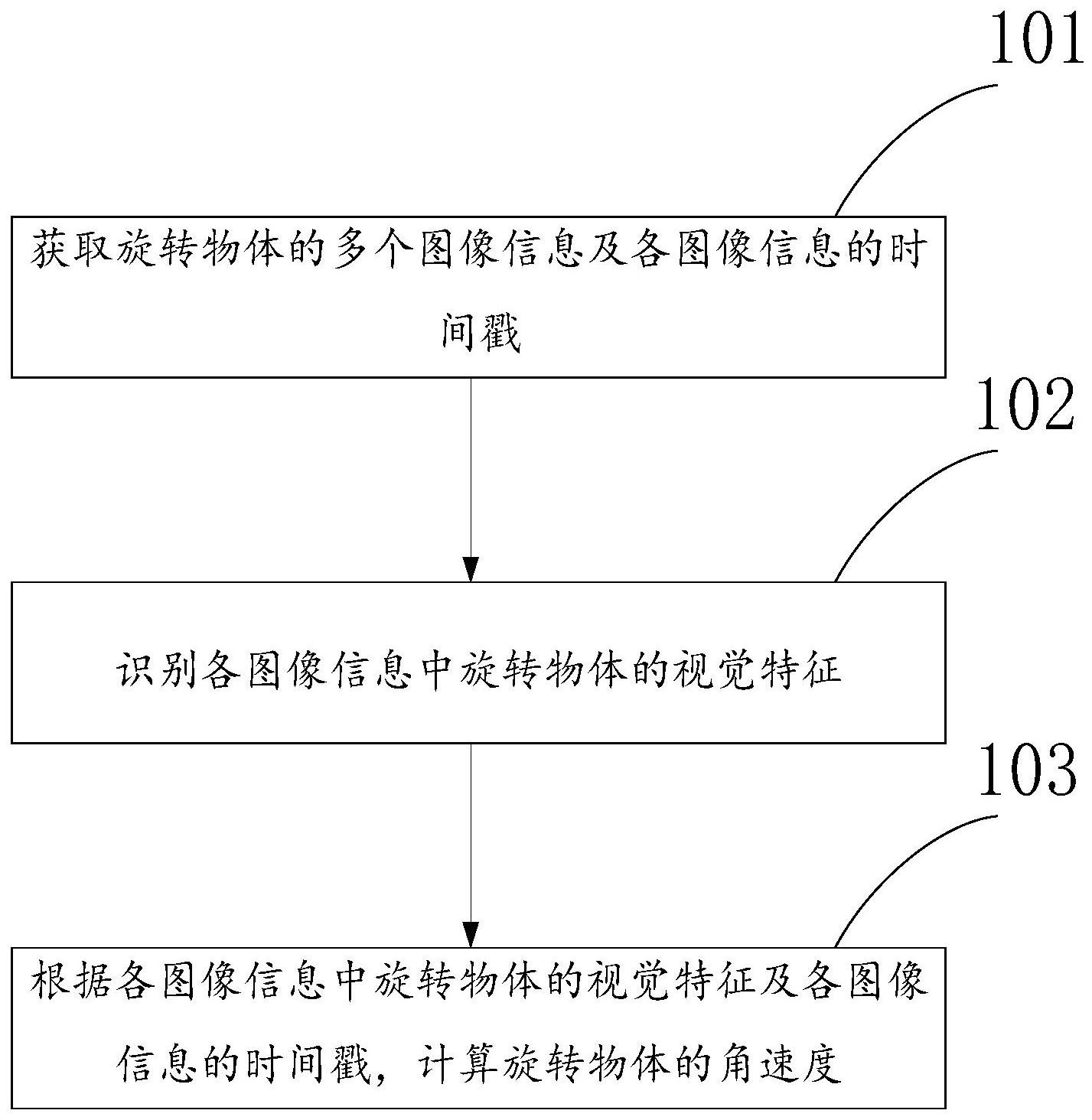
光学传感器:通过测量物体上特定点的位移来计算角速度。这种方法适用于需要非接触测量的场合。
-
角速度传感器:基于惯性测量原理,当物体绕某一轴线旋转时,其上的质点就会产生离心力,这种力会导致传感器内部的某些部件(如陀螺仪或加速度计)发生位移或变形,从而测量角速度。
-
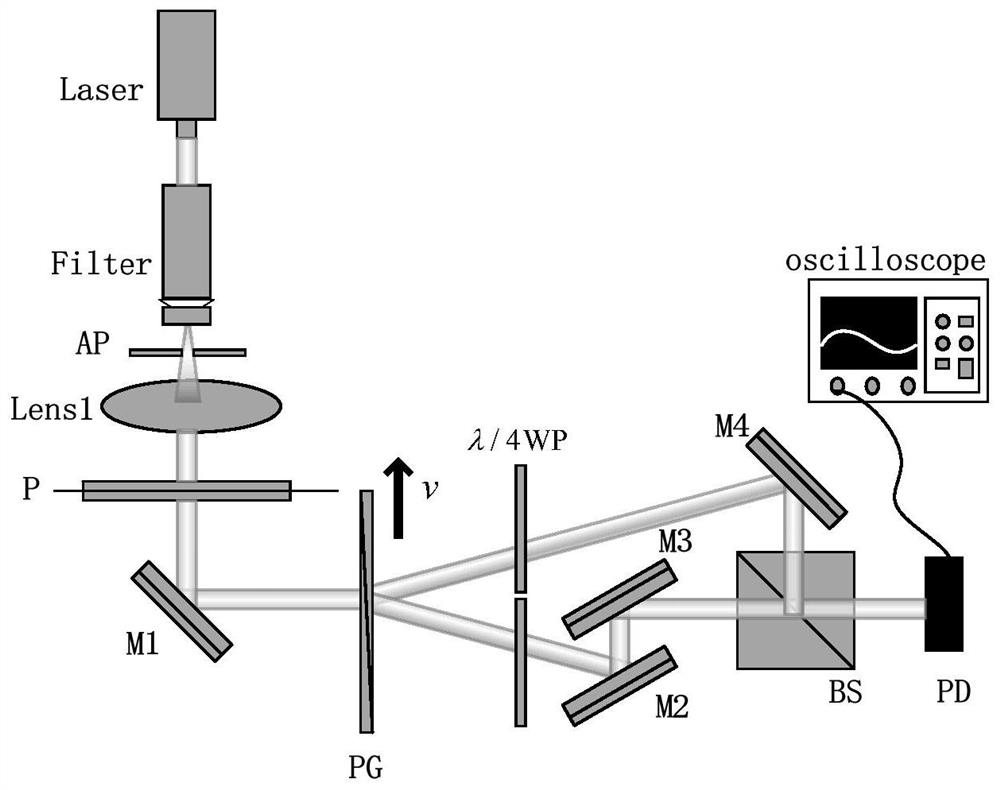
利用旋转光栅衍射光谱:通过测量光栅衍射的明纹在焦平面上的位置随入射角做周期变化的公式,可以测量转动物体的角速度和角加速度。
-
IMU(惯性测量单元):IMU内装有三轴的陀螺仪和三个方向的加速度计,可以测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
-
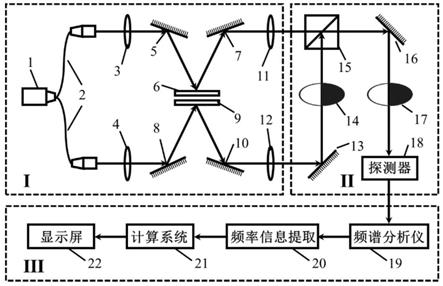
激光干涉仪:通过两束测量光束测量物体表面两点的线速度,根据两速度的差值与光束的距离之间的关系计算出被测物体的角速度,实现旋转轴角运动参数的非接触测量。
这些方法各有优势和适用场景,选择合适的测量技术需要根据具体的应用需求和条件来决定。例如,对于高精度和高可靠性要求的航空航天领域,陀螺仪和IMU是常用的选择。而对于需要非接触测量的工业应用,光学传感器和激光干涉仪可能更加合适。