解释李雅普诺夫稳定性理论的基本概念
参考资料

Moonshot回答
李雅普诺夫稳定性理论是由俄国数学家亚历山大·李雅普诺夫在1892年提出的,用于分析动态系统的稳定性。该理论主要关注系统在受到扰动后能否返回到其平衡状态。以下是李雅普诺夫稳定性理论的基本概念:
-
平衡点:系统在没有外部影响时保持不变的状态。在数学上,这通常表示为系统导数为零的点。
-
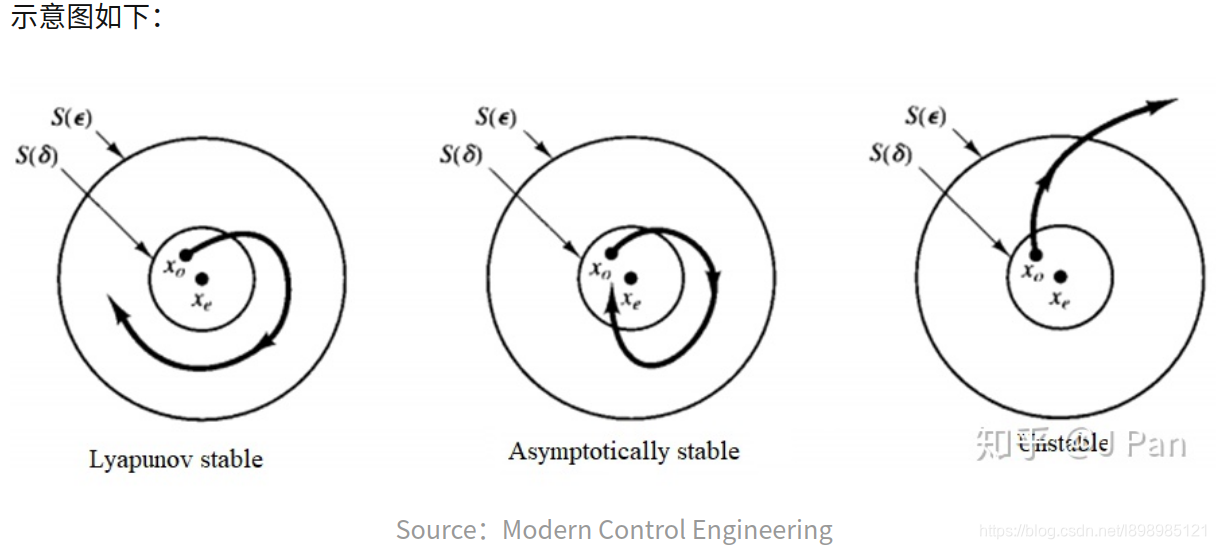
稳定性:如果系统在受到小的扰动后能够返回到平衡点,那么这个平衡点被认为是稳定的。稳定性分为几种类型:
- 李雅普诺夫稳定性:系统状态在受到扰动后能返回到平衡点附近,但不一定回到平衡点。
- 渐近稳定性:系统状态不仅能够返回到平衡点附近,而且随着时间推移,能够无限接近或达到平衡点。
- 不稳定平衡:系统在受到扰动后会远离平衡点。
-
李雅普诺夫函数:一个标量函数V(x),用于衡量系统状态与平衡点的距离。如果这个函数在平衡点附近是正定的,并且在系统演化过程中是负定的或负半定的,那么可以证明系统是稳定的。
-
直接法和间接法:
- 直接法:通过构造李雅普诺夫函数直接分析系统的稳定性,不需要求解微分方程。
- 间接法:通过求解系统的微分方程,分析系统状态的演化来研究稳定性。
李雅普诺夫稳定性理论特别适用于非线性系统,因为它允许通过线性化方法来分析非线性系统的局部稳定性。这一理论在控制理论、力学、经济学等领域都有广泛的应用。
图片来源:网络搜索结果